
巨大ロボット
前回の続き。
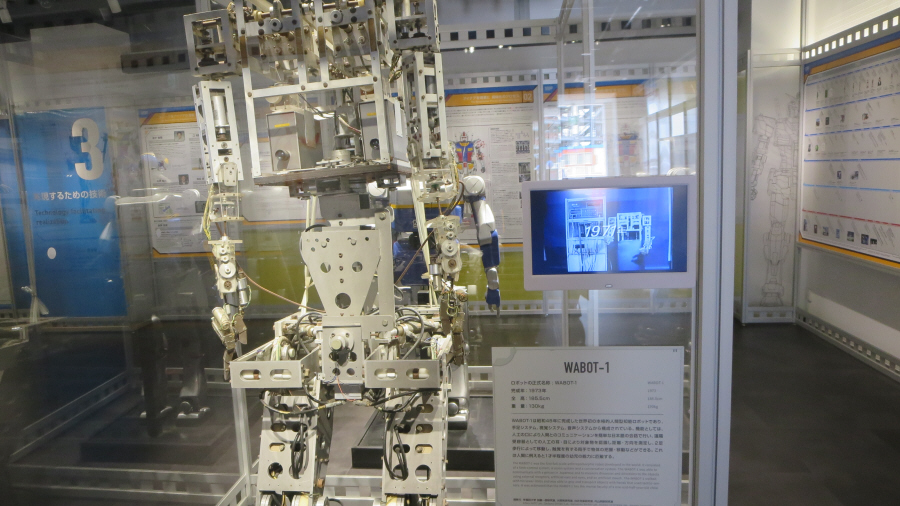
ガンダムファクトリーヨコハマの「ACADEMY」の中にWABOT(ワボット)というロボットが置かれていた。
1973年に完成した『世界初の本格的人間型知能ロボット』 WABOT-1。
全高185.5cm、重量130kg。
本棚探したら
『人間型ロボットのはなし / 早稲田大学ヒューマノイドプロジェクト編著 / 1999 / 日刊工業新聞社』
が出てきた。
昔、ロボット作りたいと言ってWA(ワ)大へ行きたがっていた同級生がいたことを思い出し、
ついでに理科の先生が、ガンダムのような巨大ロボットは現実にはアニメのようには歩けない、と話していたことも思い出した。
細かい内容は覚えていないが、もっと足を太くする必要があり、太くしたらしたで無理だとか何だとか。
単純に一辺Lの立方体を10倍にすると体積は10L × 10L × 10L = 1000Lで1000倍。
同じ材質(同じkg/m3)ならば重さ1000倍。
『巨大ロボットを作るのはどうして難しい?』に書かれていたことでもあるが、
- 巨大化していくと関節に負荷がかかる
モーター、減速機みな重くなる - 転びやすくなる
高さ18mのモノが転んだら(倒れてきたら)危険
それでも
実物大ガンダムの高さ18m --- WABOT-1の約10倍
一方、重さ約25t --- WABOT-1の約20倍
だからかなり軽量化されている。アニメの設定よりも軽いとのこと。
※ フレームは鋼鉄、外装はFRP(繊維強化プラスチック)
動きはゆっくりだが、結構滑らかで、足裏まで見せてくれる。
支えがなくても歩けそうに見えるが……
それでも
『最新の技術でも自立した二足歩行は不可能でした』。
よくよく考えると
手(ロボット・ハンド)
腕(ロボット・アーム)
は大変有用だが、
足は……。
素早く移動することが目的ならば、二足歩行より四足歩行や車輪のほうが速くて安定している。
宇宙でなくても
『あんなの飾りです』
と言いたくもなる。
でも日頃二足歩行している動物は人間だけなので、二本足のほうが親しみ湧くようだ。
たとえガンダムではなくザクであったとしても。
自由度 dof
自由の度合い degrees of freedom。
各パーツが見えてメカに興味抱いたところで、
自由度についておさらい。
言うまでもなく全く身動きできなければ自由度は0。
力学の学び始めに扱う物体は、質量があるものの大きさを無視した点すなわち質点で、その運動は3次元の場合、x、y、z方向に分けられるから自由度は3。
前後、左右、上下。
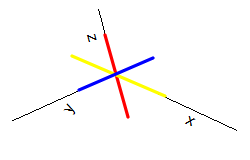
さらに学んでいくと大きさも考慮した剛体(変形しない物体)の運動で慣性モーメントとか出てくるが、同じ位置で回転運動が加わる。
すなわち
x軸(前後方向)まわり --- ローリング、横揺れ
y軸(左右方向)まわり --- ピッチング、縦揺れ
z軸(上下方向)まわり --- ヨーイング、偏揺れ
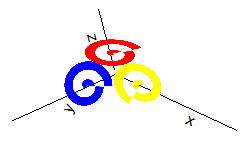
前後、左右、上下 + ロール、ピッチ、ヨーで自由度は計6。
動くガンダムの関節自由度はハンド除いて24、とのこと。
ザッと見ていくと
足首 ピッチ 1 × 2
膝 ピッチ 1 × 2
股 ピッチ 1 × 2
腰 ヨー 1
肩 ピッチ 1 × 2
肘 ピッチ、ヨー 2 × 2
※ この「肘 ヨー」と思っていたものは「肩 ヨー」だった
手首 ヨー 1 × 2
首 ヨー 1
ここまでで16。あと8つ。
腰と首がもう少し動いて(ピッチ) +2
+ 股カバー(スカート) 2
+ 肩カバー 2
あと2つ。
足首と思っていたものはつま先で、つま先と膝との間が足首のようだ。
下の記事にいろいろ詳しく書かれていた。
ハンドの自由度が12、とのことだが、
指1本につき第1関節、第2関節、さらに第3関節まであるから、片手で15、両手で30の自由度があるハンズ。
ともかく指がよく動く。
ガンダム本体は腰の裏側でドック「GUNDAM-DOCK」、台車「GUNDAM-CARRIER」に支えられて前後へ動く。上下にも動くので、
+2加えて自由度は計56。
かくして史上最大の動くヒューマノイドはガンダム。
ガンダムを超えるのもガンダム。もしくはザク。たぶん。

